Background
Infrared (IR) imaging systems are gaining importance and much attention when there is a need to deal with civilian or military equipment. These types of equipment are used everywhere whether the applications are military (target acquisition, surveillance, homing, and tracking) or non- military including remote temperature sensing, thermal efficiency analysis, weather forecasting, spectroscopy, and environmental monitoring.
Challenges
There are various IR detection and tracking systems available, but segmentation of IR ship images is one of the most difficult problems to solve. This is due to IR imaging equipment limitations and differences in sea conditions. In ship images, these limitations are primarily replicated as intensity inhomogeneity, sea clutters, and noise in ship images.
Research Goal
This project seeks to offer a region-based framework for ship detection in IR images to address the key criteria of precise segmentation of IR ship images in the face of all the above challenges. Furthermore, this project demonstrates that by simply searching around the conspicuous regions of the input image, the speed and accuracy of IR ship detection algorithms may be improved.
Proposed Solution
The saliency map of the input image was generated using the Graph-Based Visual Saliency (GBVS) technique to achieve the desired goal and identify the most salient regions. After identifying the saliency map, multilevel thresholding of the saliency map is performed to get the ranked salient regions of the input image. Top-k sections are further processed to obtain fine segmentation of the target. A region-based framework is developed for this aim, which is based on the spatial constraint-based fuzzy c-mean algorithm segmentation approach. This framework is introduced together with an approach for determining the cluster selection threshold.
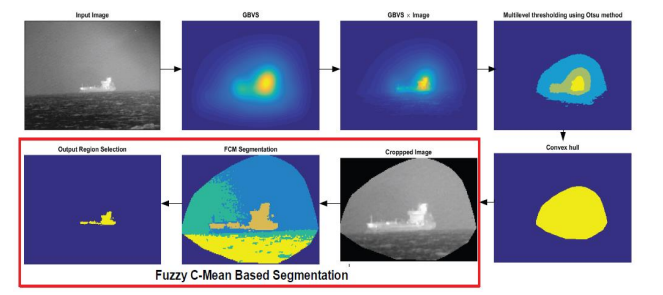
The flow of the IR ship detection algorithm is presented
To evaluate the performance of the proposed framework on IR ship detection in challenging images, experiments were performed on a data set of 18 diverse images collected from different sources.
Results
Comparison of the region-based FCM algorithm with FCMI is performed to assess performance using standard measurements such as accuracy, recall, and F-score. In addition to these performance measures, the average segmentation time of each algorithm is calculated.
According to the experiments, FCMR has an average F-Score of 0.576, which is 13% higher than the average F-Score of the image-based method FCMI, which is 0.445. Similarly, the execution time of FCMR (1.498sec) is faster than that of the similar image-based algorithm (2.843sec).
Limitations
Out of some of the issues encountered throughout the project’s implementation, one was that of the lack of sufficient publically accessible IR ship picture collections. Furthermore, because the proposed FCMR is an iterative segmentation approach, choosing the right number of iterations is essential for successful segmentation.
Conclusion
This led to the conclusion that a region-based algorithm is better in terms of both accuracy and efficiency. From the findings, it is evident that the proposed framework is very effective and perform better compared to the methods which directly search the target in the entire image.
Our vision is to lead the way in the age of Artificial Intelligence, fostering innovation through cutting-edge research and modern solutions.